CAD Design
Mechanical design as part of the engineering workflow.
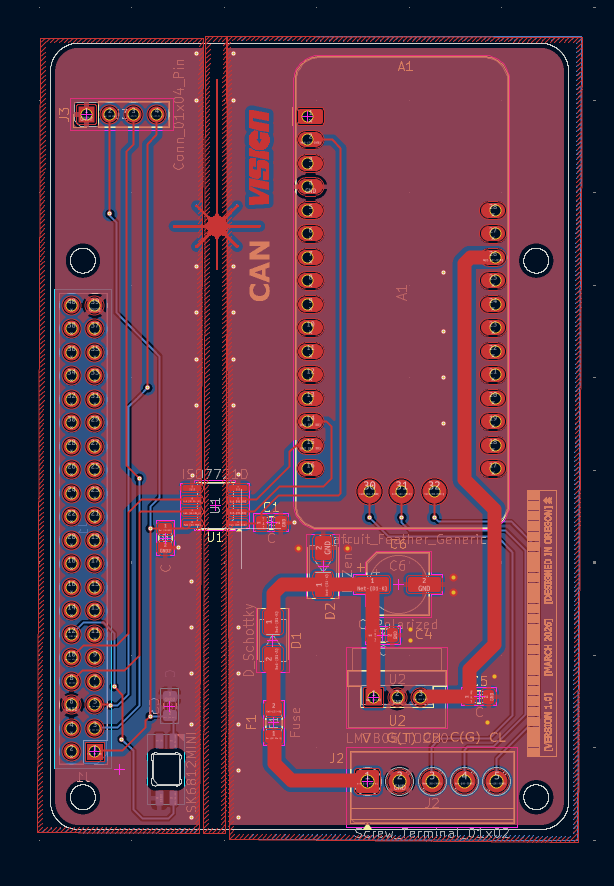
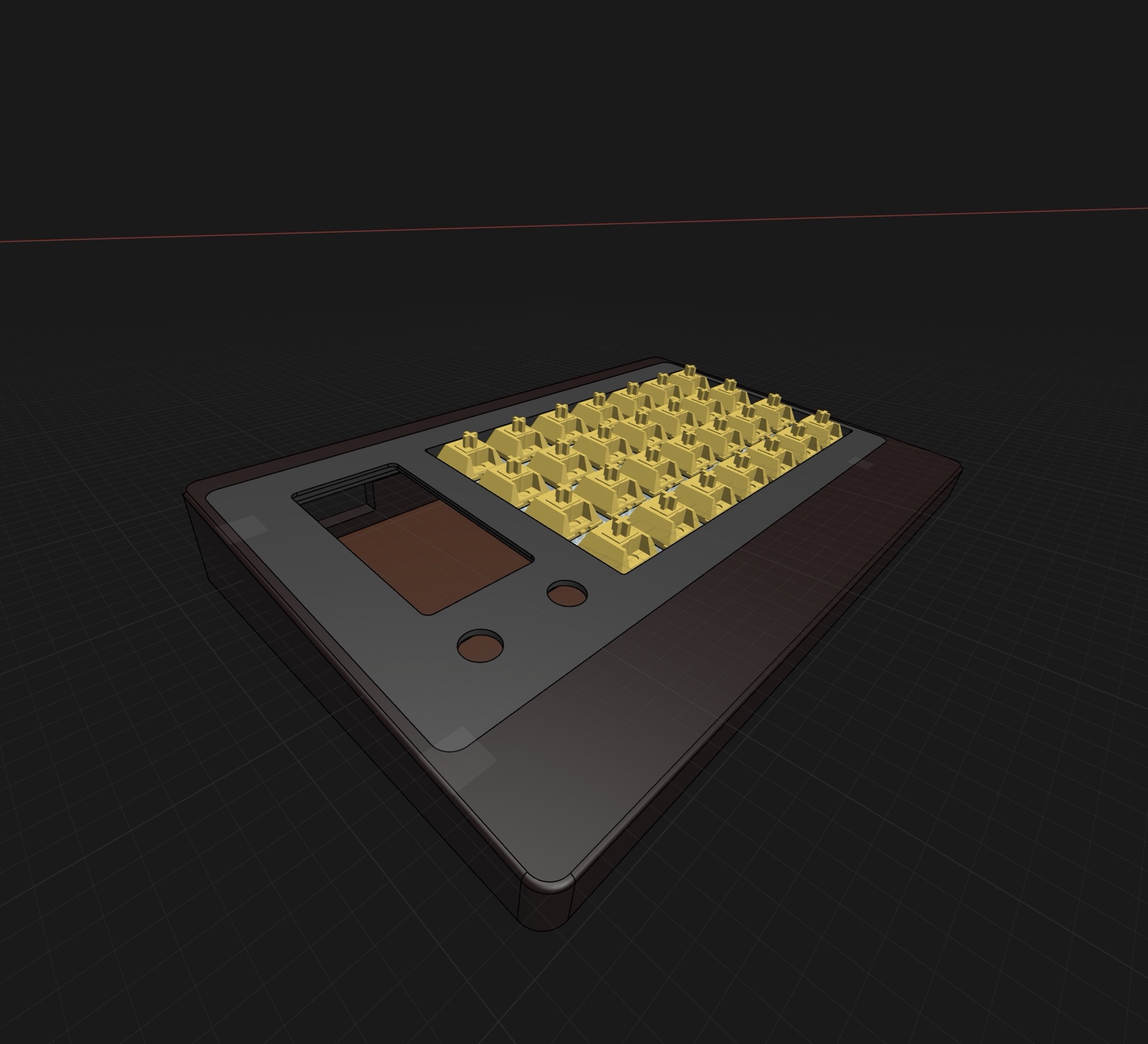
Voyager uses CAD not just for visualization, but as a core engineering layer tying together PCB geometry, enclosure tolerances, display placement, ergonomics, cable routing, 3D-printed prototypes, and manufacturable physical layout.
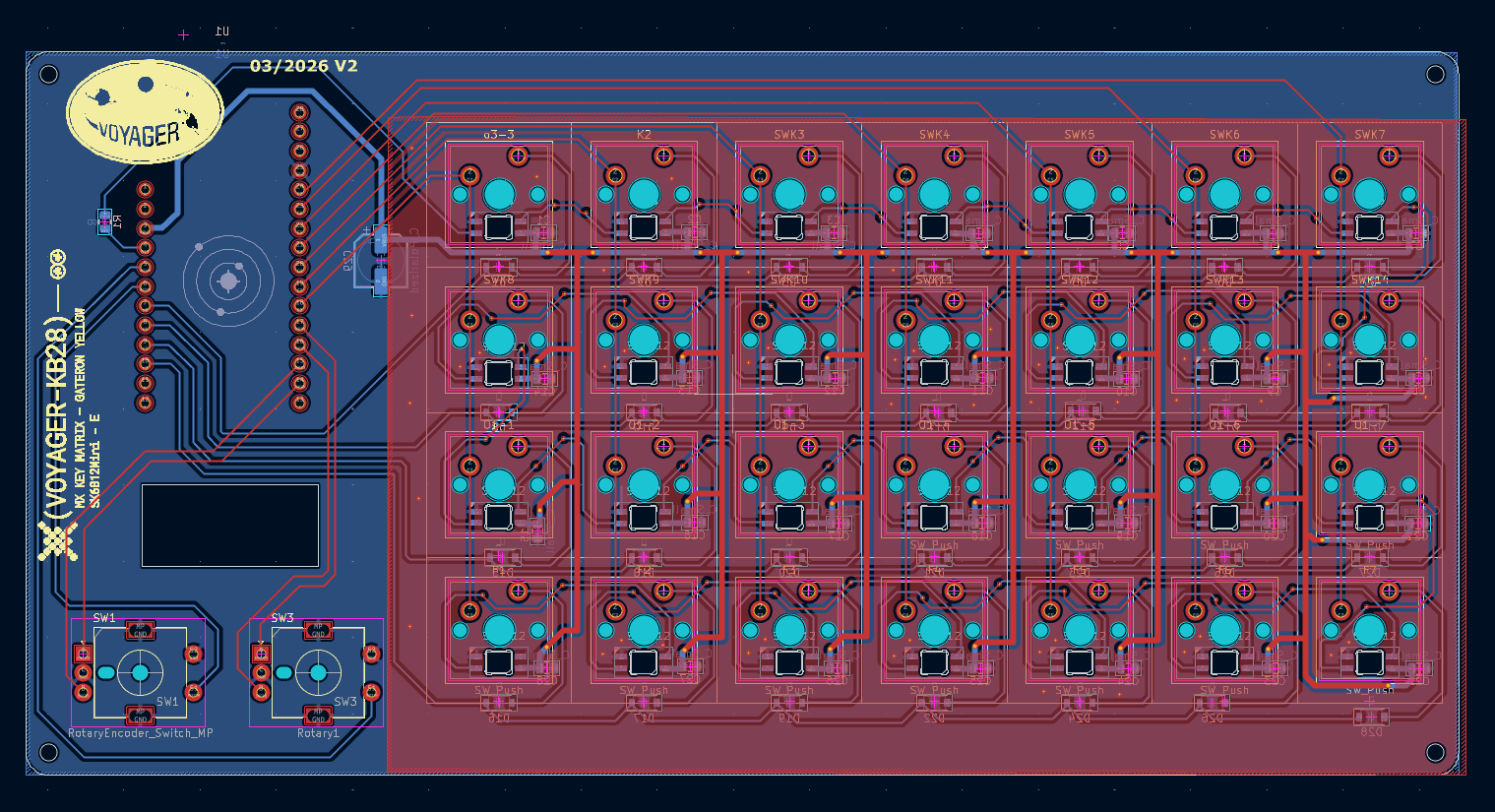
Mechanical integrationPCB dimensions, switch spacing, display windows, encoder placement, and mounting geometry are designed as one coordinated system.
Cross-discipline valueCAD workflows support rapid prototyping, enclosure iteration, fabrication planning, and hardware validation across embedded and physical product work.
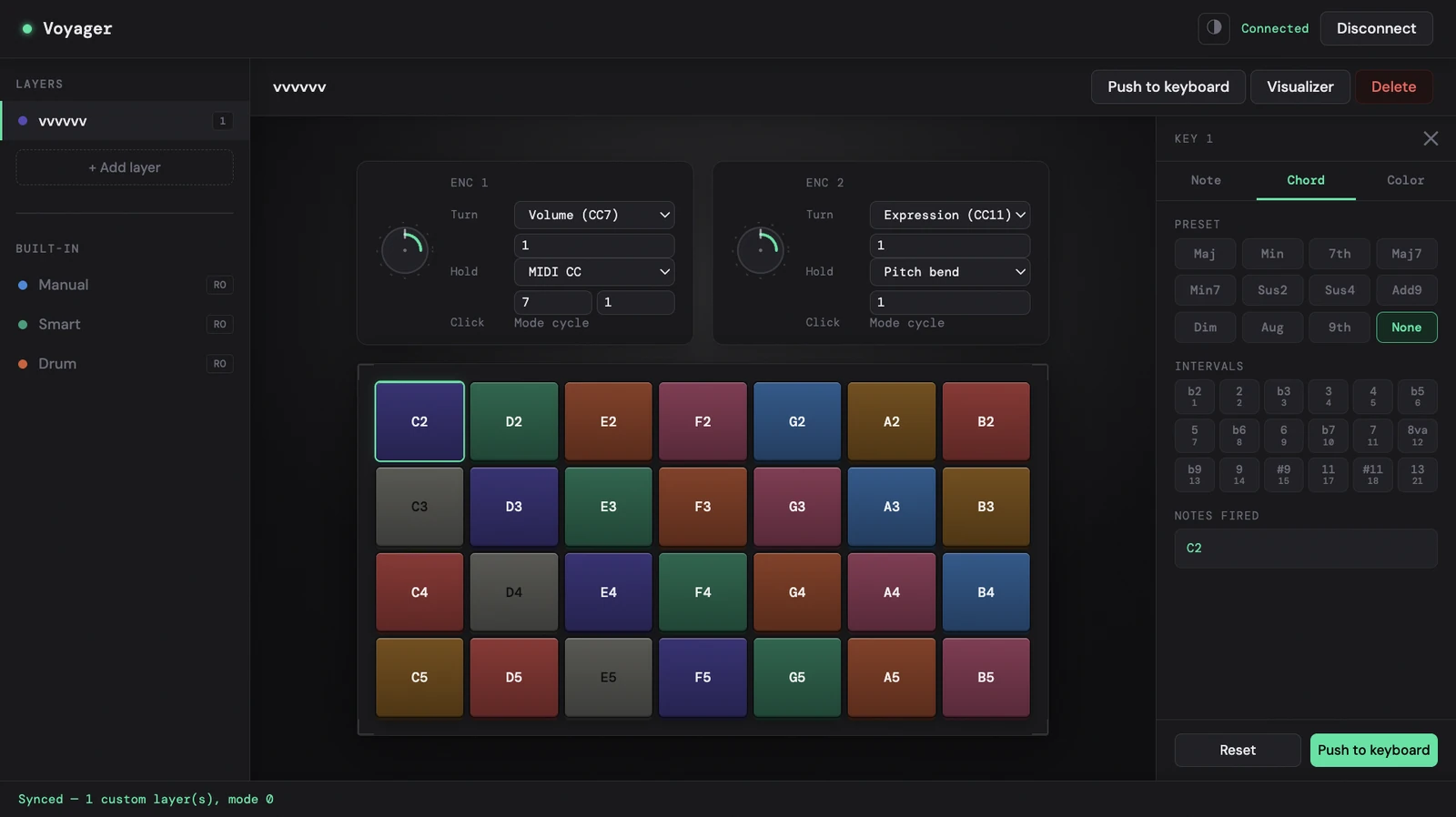
Product-oriented thinkingMoves the project beyond electronics alone into ergonomics, usability, physical interaction, and real-world assembly constraints.
Engineering utilityTransferable CAD skills support industrial design, fixture planning, mounting systems, enclosure design, and hardware integration workflows.
CAD Modeling
Mechanical Layout
Enclosure Design
Tolerance Planning
3D Printing
Rapid Prototyping